Dažnas klausimas forume – va, noriu skraidyt, noriu kelt DSLR’ą į orą, noriu skraidyt FPV, nuo ko pradėt…
Pamėginsiu aprašyt savo siūlomą startą. Priimam prielaidą, kad bazinės žinios jau yra, nereikia aiškinti, kas yra rudderis, kaip jungiasi imtuvas, kas yra ESC, bei kaip skristi “į save” – laikom, kad tas bandytojas jau skraidė su lėktuvėliu ir turi bazines žinias.
Dažniausiai pasitaikantys klausimai/atsakymai:
- Q: Koks kontroleris (FC) geriausias?
- A1: veikiantis
- A2: toks, su kuriuo skraido kaimynas ar draugas
- A3: bet koks, paprasčiausias, open source, be ‘pričindalų’, ‘vykruntasų’, ‘navarotų’, ‘pribumbasų’ ir kitų buzzwordų. Be GPS, be magnetometrų ir kitų gudriai skambančių dalykų. KK2, NAZE32 ir krūva kitų variantų – ~20$, acro mode dažniausiai aplenks kontrolerius, kurie kainuoja 1000$+, mokymuisi pats tas.
- Q: man sakė, kad užtenka pasiimt kietą kontrolerį, užkabint DSLR ir iškart pasidarai kietas! Ar čia tiesa?
- A: Žinoma, tik dėl to kietumo reik nepamiršt pasiimt minkštą maišelį – susidėti copterio likučiams (jei tokie bus – dažnai upė, ežeriukas ar miško tankmė nepalieka nieko)
- Q: Aš tikrai nedarau klaidų, todėl pradėt nuo paprasto copterio man neapsimoka, ar geriau imt Cinestar’ą, ar S800?
- A: Sumaišei temas, tau reikia čia
- Q: Nu bet tikrai nebus crashų, todėl aš noriu sutaupyt ir iškart imt rimtą copterį! Gi daug susitaupys!
- A: Crashų pradedančiam nebus tik vienu atveju – jei nebus skraidoma. Jei atrodo, kad esi išskirtinis ir niekad nepamesi orientacijos (ir copterio tuo pačiu), išvengsi dažnai ir retai daromų klaidų (variantas “tik durni mokosi iš savų klaidų, protingi mokosi iš svetimų” čia nelabai veikia), tai greičiausiai klysti.
- Q: Pradedu rinktis copterį, kokius varikliukus/propus imt?
- A: Kaip pradedančiam – mažas skirtumas, pageidautina mažus, lengvus ir pigius, ~1000kV. Vis tiek po kelių pirmų bandymų pakelt (skaityt reikia “apsiverst”, nes bus sumaišyti mikseriai, propų tvarka, blogi trim’ai ir t.t.) pradės barškėt guoliai, susilankstys ašelės. Brangūs varikliai pataps blogesniais nei pigiausi jau po pirmo crasho, todėl daug investuoti neapsimoka. Atitinkamai ir su propeleriais – visi tiek karboniniai, mediniai ir pan. – jie geri, bet brangūs. Pirmiems pastriksėjimams užteks pigių propelerių komplekto. Bet kuriuo atveju, labai rekomenduotina pasiimti papildomą varikliuką (jei daromas quad’as – tai pirkti penkis, ne keturis), bent jau antrą propelerių komplektą (CW/CCW), ir, jei yra galimybė – pora ašelių, guoliukų komplektų
- Q: Kokį gimbalą kabint mano pirmam copteriui?
- A: Jokio
- Q: Kodėl siūlomos tokios mažos baterijos, tokie silpni varikliukai?
- A: Kuo mažesnis copterio svoris – tuo mažesni nuostoliai nukritus. Kaip ir lėktuvėliuose, taip ir čia – reikia stengtis padaryti kuo lengviau, išlaikant tvirtumo reikalavimus (nesistengiant padaryti “nesulaužomu” – silpnos zonos turi būti, kurios sugers smūgio energiją). Crasho metu “lengvas tvirtas ir rankomis nesunkiai sulaužomas” copteris patirs kur kas mažesnius pažeidimus, negu “padariau nesulaužomą, sveria 5kg!”
- Q: Kiek pinigų reikia “įmerkti” pirmam copteriui?
- ~300lt, viską perkant užsienio parduotuvėse (kaina labai priklauso nuo pasirinkto FC)
- ~600lt, viską perkant LT
Pirmojo copterio gamyba:
Turbūt pirmas iškilęs klausimas bus “o kodėl darytis tą copterį, kai siauraakiai parduoda panašius už keliasdešimt litų”? Atsakymas labai paprastas – nusipirksit kinietišką copterį, reiks dar sugebėt jį sudėti teisingai (nesitikėkite idealių sujungimų, nesilankstančių kojų ir pan.), o po pirmo crasho dar mėnesį lauksite dalių. Net ir nusipirkus RTF versiją – vis tiek po crasho reiks laukti atsarginių dalių (kurių greičiausiai pas mus nerasite).
{kind=link}
Žemiau aprašomas copteris padaromas per pora vakarų, suremontuojamas dar greičiau. Nebijo švelnių smūgių (jei ir klius labai nesėkmingai – varikliukų ašys pakeičiamos labai nesunkiai), esant rimtam crashui – remontuojamas labai greit, o skrenda tikrai padoriai (jau girdžiu “DJI klonai iš HK yra pigūs” – o kas tą naujoką išmokins susidorot su “kvadručiu-drebučiu“?).
Taigi, mums reikės:
- varikliukų, su propelerio tvirtinimais (nesiūlau propsaverių – geriau paprasti “collet” tipo adapteriai). Neblogas pradinuko pasirinkimas čia (tik jei reiktų naudoti 10″ propelerius – reik daryti atitinkamai per pora cm. ilgesnes kojas) ir čia. Arba čia (HK EU – be muitų ir kt. problemų), čia ir kitur…
- Propelerių. Aukščiau minėtiems varikliams neblogai tinka šie bei šie (HK EU – be muitų) atitinkamai (750kV varikliui reik 10″ propelerių). Patys propeleriai tikrai nėra geri – jie nėra balansuoti, minkšti – bet jie pigūs ir ne taip greit lūžta.
- ESC. Aš naudojau 12A HK Blue– bet čia nėra taisyklė – copteris turėtų skristi ir su kitais ESC. Reikia nepamiršt, kad ESC reitingas turėtų viršyti maksimalią varikliukų naudojamą srovę. Kodėl būtent šie ESC:
- išorinis rezonatorius – reguliatorių nereikia perkalibruoti keičiantis aplinkos temperatūrai
- efektyvus HW dizainas (mažiau kaistantys reguliatoriai)
- gabaritai ir svoris
- nesunkiai perflashinami į labai tinkamą multicopteriams firmware
- baterijos – tiks bet kokia ~1Ah talpos, su ne mažiau nei 25C iškrova (pageidautina daugiau)
- FC (žr. FAQ)
- Poros lapelių faneros (“Medžio centre” po 1.20lt už lapelį laminuotos, arba po pusantro lito “Senukuose” už didesnį lapelį
- liepos/drebulės pagaliuko
- Varžtelių (aš pirkau “Varžtų pasaulyje”, bet ten brangu ir patys varžtai nelabai geros kokybės – tai manau HK “juodi” būtų gal net ir geresnis pasirinkimas (jei bus perkami tokie varžtai – iškart pasirūpinkit ir įrankiais jiems)
Alternatyvus variantas, nenaudojant faneros – padaryti iš senų DVD diskų.
Deja, negaliu rekomenduoti, kokie diskai yra geriau – kartais jie atsisluoksniuoja. Vieni diskai, kuriuos mėginau papuolė labai geri, kiti (TDK DVD-+R) iškart po pjovimo susisluoksniavo į du sluoksnius:
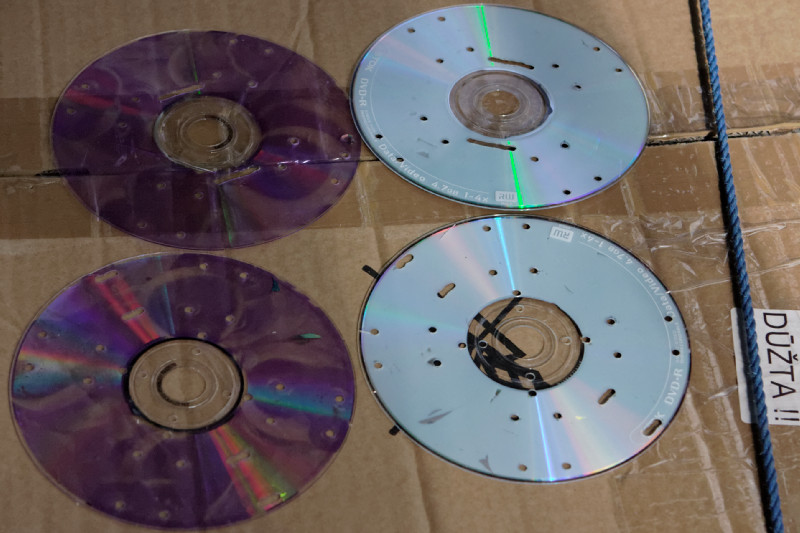
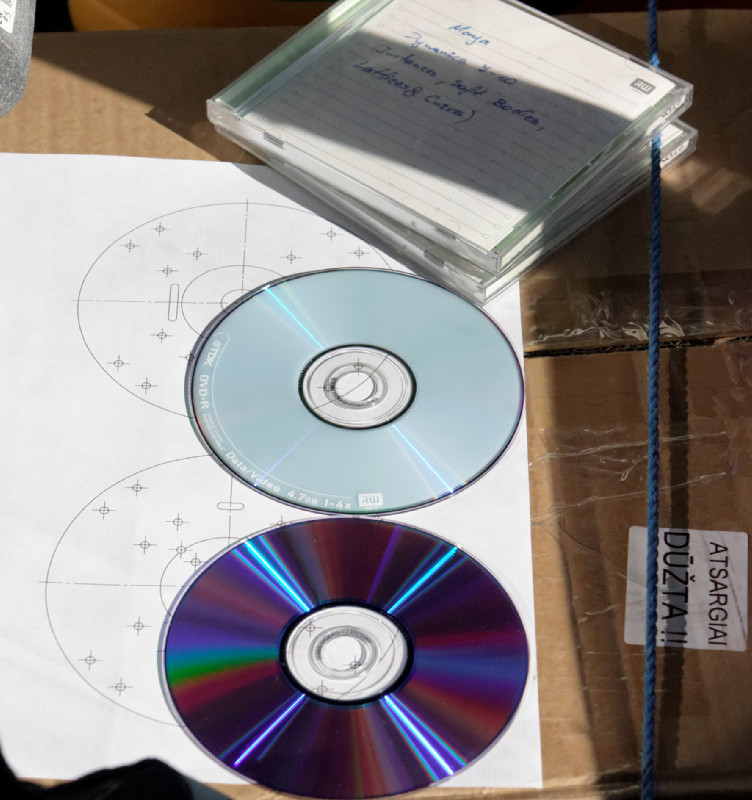
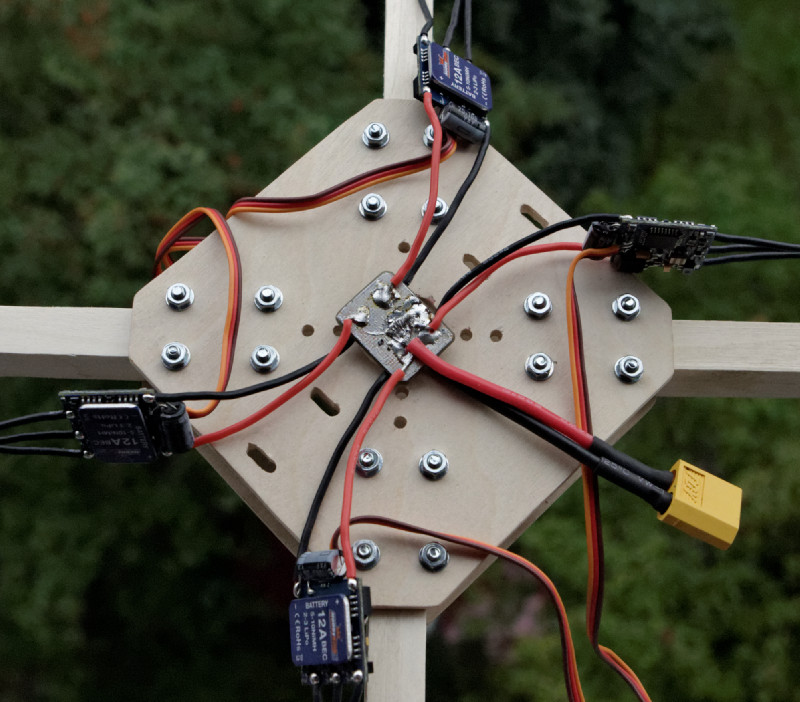
Aišku, tokių naudot negalima… Todėl darysim iš faneros. Bendras rezultatas turėtų gautis maždaug toks:
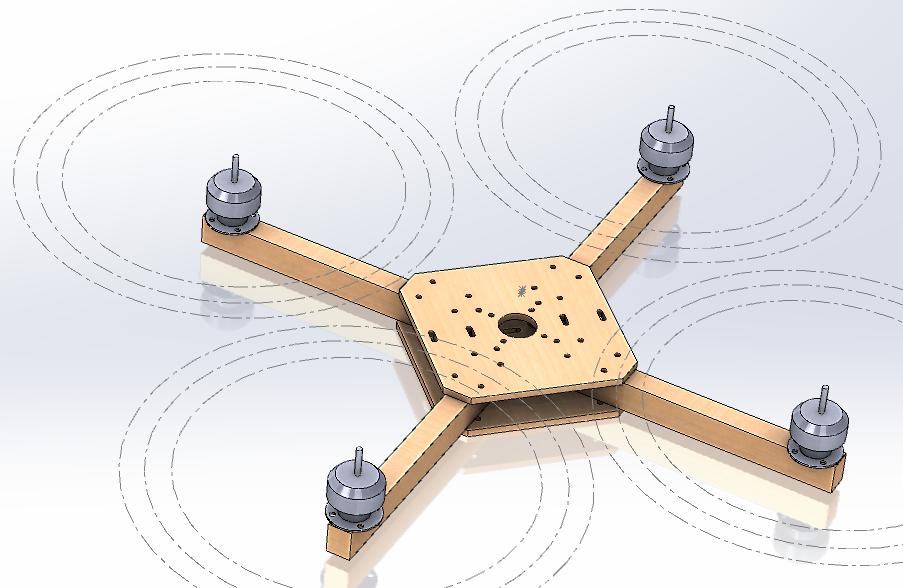
(punktyru pažymėti 8, 9 bei 10″ propelerių matmenys)
Centrinės plokštelės matmenis rasite čia (100% dydžio – galima spausdinti ir klijuoti ant faneros). Prieš pjaunant fanerą siūlau ją iš abiejų pusių apklijuoti plona, skaidria izoliacine juosta – taip ji mažiau pleišės, turėsim šiek tiek gražesnes plokšteles. Ant plėvelės bet kokiais klijais klijuojam atspausdintą paveiksliuką ir išpjaunam pagal kontūrą su siaurapjūkliu:

Paskui tą plėvelę nesunku nuplėšti ir nušveisti likučius:

Iš liepos (drebulės, tuopos) gabalėlio išsipjaunam kojas. Mano naudotas skerspjūvis – 13x17mm, kojų ilgis gali keistis, priklausomai nuo pasirinktų varikliukų (16cm bus neblogai su mažais varikliukais). Jei bus pasirinkti 750kV varikliukai – tai atitinkamai reiks per 2-4cm ilgesnių kojų. Aš pjoviau tiesiai su siaurapjūkliu, nesigavo labai gražiai ar tolygiai, bet… Kas svarbu – išlaikyti siaurųjų kraštinių lygiagretumą, nes kitaip copterį trauks į šoną.

Pabandom viską sudėti į krūvą – pasižiūrim ar tinka, ar niekas niekur nekliūva:
Jei kam kyla klausimų, kodėl kojos tvirtinamos keturiais varžtais – atsakymas paprastas – pragręžus skyles kojose jos bus daug silpnesnės. Be to, reiks labai tiksliai atitaikyti skyles visose trijose plokštelėse, kas pradedančiajam nėra labai paprasta.
Jei viskas susideda, klebančių dalių nėra, netelpančių taip pat – galima eit toliau ir primontuoti dalį elektronikos:

Kaip tas daroma:
- – iš pradžių sulituojam ESC su varikliukais (naudojant termokembrikus – jų yra “Evitoje”, “Lemonoje”, arba vėlgi, pas kiniečius). Jei ESC sukimosi kryptis lengvai nekeičiama – tai sulitavus, bet dar neužpūtus termokembriko reiktų patikrinti variklio sukimosi kryptį. Tam reikalui prijungiam servo testerį arba imtuvą, bateriją prie ESC ir pasitikrinam, ar variklis sukasi tinkama kryptimi (kryptis rasite savo FC aprašyme, bet quado visada galios viena taisyklė – šalia esantys varikliai suksis į priešingą pusę, o priešais esantis variklis – į tą pačią). Jei ne – sukeičiam du bet kuriuos laidus, einančius į variklį.
- Varikliuką dedam ant kojos galo ir pritvirtinam lanksčiais dirželiais (kurių vėlgi, yra senukuose – reikia maždaug 2.5-3mm). Dveji dirželiai, perverti per variklio tvirtinimo skyles, užveržiam ant kojos. 750kV varikliukų atveju juos reikia dėti su papildomu motormountu (ir naudoti 3 dirželius).
Kodėl dirželiai, o ne normalus tvirtinimas? Esant “liūdnai situacijai” dirželiai tiesiog nutrūksta, o variklis lieka sveikas. Pakeist dirželį – minutės darbas, pakeist variklį – pusvalandžio. Normalaus (ir netgi švelnaus acro) skraidymo metu dirželių tikrai užtenka, be to, net ir vienas atlaiko nesunkiai (žr. video pabaigoje) vieno varikliuko trauką)
Taigi, toliau sulituojam laidus į krūvą. Čia vėlgi, yra daug variantų (vienas už kitą geresnių), bet naujokams rekomenduočiau paimti paprastą dvisluoksnės PCB gabaliuką (jų yra “Lemonoje”, “Evitoje” ir “RCL”, nors greičiausiai yra ir namie – galima išpjaut iš senos motininės plokštės) ir sulituoti laidus ant jos. Tokiu atveju, nereiks užsiiminėt akrobatika bandant sulituoti 5 (ir daugiau) laidų į krūvą. Vienas iš variantų:
Galima naudoti “X” formos plokštelę (kaip vėliau ir padariau šiam quadui). Pirmiems skrydžiams siūlau net nelituoti papildomų laidų baterijos monitoringui ar LED’ams – išardyti ir pridėti papildomus laidus nesunku, o apsunkinti pirmo quado gamybą nėra reikalo.
Tolimesni veiksmai – per pailgas skyles faneroje prakišame lipnios juostos gabaliukus (velcro) – jos pagalba bus tvirtinama baterija, imtuvas. Apačioje gerai tinka tokia juostelė, (bet galima apsieit ir be jos, vieną iš velcro juostelių klijuojant tiesiai ant faneros), viršuje – bet kokia tinkamo pločio, arba jos visai galima nedėti.
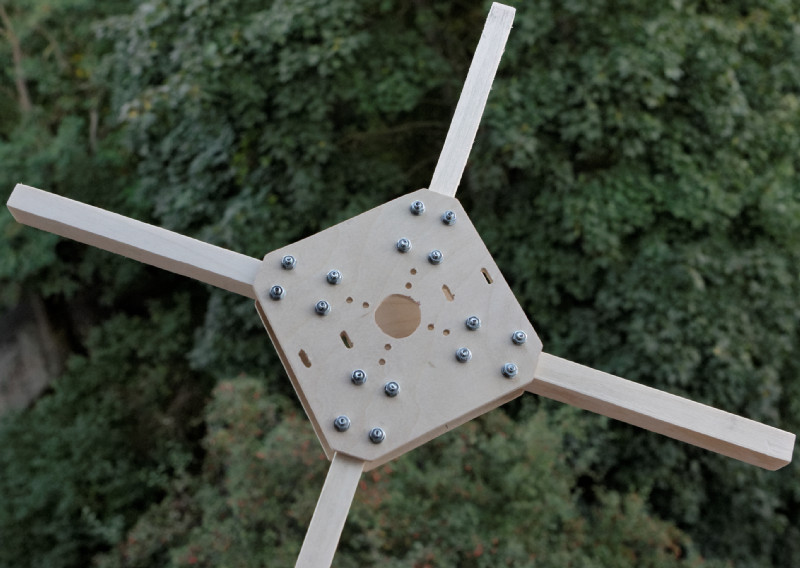
Toliau: atsukam varžtus, nuimam viršutinę plokštelę (varžtų ištraukt nereikia), sukišam laidus į tarpus. Į viršutinę plokštelę susukam varžus, kuriais tvirtinsis FC (jei bus naudojamas “gudrus” FC su magnetometru – reiktų vengti plieninių varžtų), vėl uždedam plokštelę ir priveržiam varžtus. ESC ir palaidus laidus galima tvirtinti lanksčiais dirželiais ar plona izoliacijos juostele (tikslas – kad jie nekabalduotų kur papuolė, bet nereikia jų užspausti “mirtinai”).
Kojas padariau iš pakavimo putos (EPP), bet tinka bet kokia kita minkšta medžiaga. Jei nėra fantazijos – tai “Senukuose” yra vandentiekio apšiltinimo žarnų, kaina ~3lt už metrą – tokios šlangos užteks dešimčiai copterių, o kojos išeina neblogos. Uždedam propus, FC ir turim maždaug tokį rezultatą:

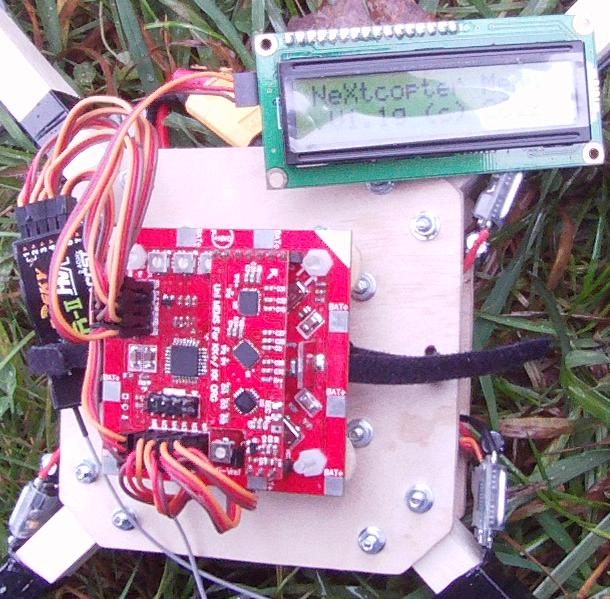
Čia yra vienas rimtas niuansas – mano pateikti brėžiniai skirti montuoti kontrolerį, tarp kurio kojyčių yra 30.5mm tarpas (OpenPilot, NAZE32 ir pan.). Jei bus dedamas didesnis kontroleris (45mm tarpai, kaip pas KK2, 50x50mm PCB) – tada reik papildomai iš faneros išpjauti “perėjimą” – 3mm skylutės, išdėstytos 30.5mm kvadrato kraštinėse, bei kitos skylutės, išdėstytos 45mm kvadrato kraštinėse. Visiems tvirtinimams panaudojau M3 polikarbonatinius varžtus ir paminkštinimą iš silikono vamzdelio (supjaustytą 5mm gabaliukais), bet copteris tikrai skris, jei bus įdėti paprasti metaliniai varžtai be jokio paminkštinimo.
{kind=link}
Jei FC tvirtinimas yra ne 30.5mm kaip padaryta, o 45mm – kartu pažiūrėkite, ar atitinka tvirtinimo kryptis – būna nemažai kontrolerių, kurie tvirtinami kampu į priekį. Tokiu atveju ir “perėjimą” reiktų daryti pasuktą 45° kampu.
{kind=link}
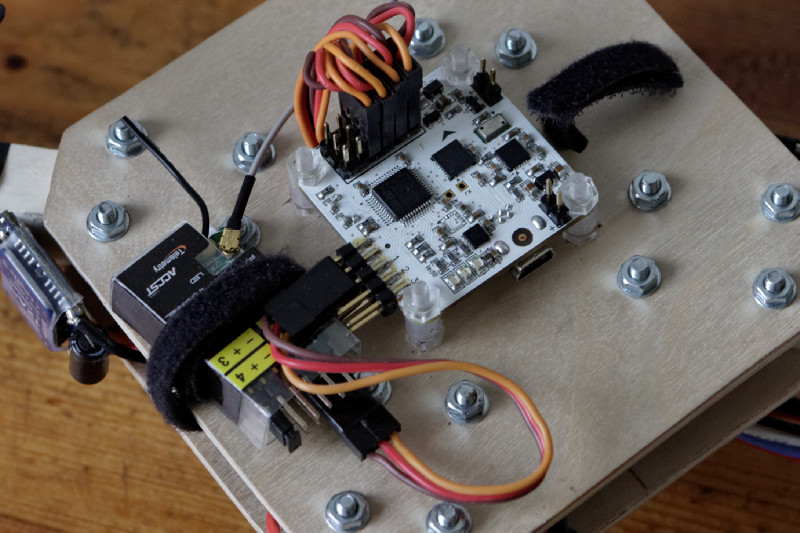
35x35mm FC atveju viskas gaunasi gan paprastai (aukščiau parodytas NAZE32 tvirtinimas). Su lipnios juostos gabalėliais galima pritvirtinti imtuvą ar kt. įrangą. Visai nebūtina aukščiau išvardintų komponentų tvirtinimui naudoti varžtus ir velcro – galima išsiversti su dvipuse ilzoliacija.
Rekomendacija – senukuose yra mažų kvadratinių indelių maisto laikymui, maždaug 12x12x8cm dydžio (išmatavimai “iš akies”). Kaina ~1.85lt. Siūlau nusipirkti, nuimti dangtelį ir apvožti juo kontrolerį ir kitą elektroniką. Smarkaus crasho metu elektronika bus papildomai apsaugota, taip pat – geras dangtis nuo lietaus, pagalba barometrui (jei toks yra).
Dar viena rekomendacija – siūlau dvejas kojas (pvz. galines) nudažyti ryškia spalva, naudojant markerį. Taip bus galima lengviau orientuotis. T.p. galima prikabinti ką nors ryškaus (tik nesunkaus) – pvz. oranžinį teniso kamuoliuką.
Šio “noobcopterio” skrydis (filmuota su senute gopro, vakarais – tai kokybė neypač, bet suprasti galima):
http://youtu.be/9yffSy6vbj8?hd=1
Niekas nebuvo adaptuota “specialiai” šiam copteriui – kontrolerio PID default, TX nuostatos irgi default. Taigi, tikrai yra daug erdvės kur tobulėti.
Skraidymas:
Pagrindinės daromos klaidos prieš skrendant:
- per skubėjimą pamirštama ką nors sujungti – nereikia skubėti, bus mažiau nuostolių
- neteisingai sudėta propelerių tvarka (arba variklių) – tą nesunku patikrinti, žr. žemiau
- labai netinkamos sąlygos skraidymui – vėjas, aukšta žolė, lietus ir t.t. – vėlgi, nereikia skubėti, reikia palaukti gražios dienos
Taigi, prieš pirmą skrydį:
- pasitikrinkite, ar kontroleris stovi lygiai ant plokštelės. Taip pat įsitikinkite, kad jis pritvirtintas pakankamai tvirtai prie copterio pagrindo – neslankioja, nesisukioja
- sukalibruokite visus ESC. Kai kurie FC tam turi papildomas funkcijas ir leidžia sukalibruoti visus reguliatorius iškart, kai kur tą reiks daryti kiekvienam regui individualiai, atjungiant nuo plokštės.
- įsitikinkite, kad visi propeleriai sukasi tinkama kryptimi (priešpriešiniai propeleriai turės vienodą susukimą, šalia normalaus propelerio visada bus reversinis – t.y. “kaimyninis” propeleris visada turės priešingą susukimą). Dar vienas pabandymo būdas – paleisti variklius palengva ir pažiūrėti, kur pučia oro srautas (visada turi pūsti žemyn)
- dar kartą patikrinkite, kad variklių pajungimo tvarka teisinga – tą galima pažiūrėt manuale. Taip, aš žinau tą istoriją “o kam tikrint, aš viską padariau gerai” – sugaišti kelias minutes papildomam laidų atsekimui yra kur kas greičiau, nei pakeist lūžusius propus
- siūlau iškart susiprogramuoti DR mix, jei tokį dalyką palaiko siųstuvas ir prisibindinti jį prie kurio nors jungiklio. Aš pasidaręs tokią sistemą – jungiklis off – DR=100%, EXPO=0. Įjungus jungiklį – DR=25%, EXPO=40%. Startuoti galima ir su 100%DR, bet jei jausis, kad copteris smarkiai per jautrus – užteks perjungti vieną jungiklį, kad valdymas pasidarytų priimtinas (pastaba – su perjungtu DR greičiausiai neveiks eilinės stick kombinacijos – arm, disarm, calibration – persijunkite į 100% DR režimą)
….atlikus patikrinimus, galima mėginti skrist. Be abejo, siūlau išjungti visus papildomus sensorius, paliekant vien tik gyro – taip išvengsite papildomų problemų.
Labai geras patikrinimas, ar viskas tvarkoje (dėmesio – pavojinga!!!):
- prijungiama baterija, sulaukiama pakol susikalibruos gyro
- perjungiama vien į gyro režimą
- copteris pakeliamas su ranka į orą, tvirtai laikant už apačios. Reik pasirinkti vietą, kur nesiekia propai (pvz. centrinė plokštė). Jei sunku – galima laikyti abiem rankomis, tegu throttle pastumdo draugas ar draugė, arba galima tai daryti su koja
- copteris užarminamas, dedam throttle vos daugiau už minimumą (t.y. kad propeleriai suktųsi palengva)
- palenkiam copterį į priekį. Priekiniai varikliai turi pradėti suktis kur kas stipriau, bandydami kompensuoti palinkimą, tas turi jaustis rankose (arba “priekinis variklis”, jei naudojama “+” konfigūracija)
- tą patį pakartojam su kitomis ašimis
Jei pasipriešinimas jaučiamas iš tos pusės, į kurią nukreiptas copteris – viskas OK, galima mėginti skristi. Jei variklių apsukos nesikeičia, arba copteris kaip tik, mėgina dar labiau apsiversti (daugiau apsukų gauna tie varikliai, kurie yra priešingoje pusėje) (pavojinga – taip galima susižaloti, dėl to ir rašiau kad laikyti reikia tvirtai) – nėra prasmės mėgint kelt į orą, reikia iš naujo tikrinti pajungimus ir kontrolerio nuostatas.
Pirmasis startas:
Dar viena pastaba prieš skrendant – klaidų turbūt bus, labai tikėtina, kad copteris apsivers, skris negražiai, sudūš ar šiaip nutiks kas nors nemalonaus. Nereikia to bijoti, ar tuo džiaugtis – tiesiog reikia priimti tai kaip pamoką ir kitą kartą klaidos nekartoti. Nereikia liūdėti – crashų buvo pas visus, svarbu tai priimti kaip pamoką, o ne pamiršus kartoti tas pačias klaidas.
Taigi, mėginam kilt. Jei copteris kaba ore – šaunu, jei ne – tai:
- copteris staigiai verčiasi viena kryptimi – propeleris uždėtas atbulai, variklis sukasi ne ta kryptimi, arba sumaišyti laidai iki kontrolerio, siūlau atlikti prieš tai buvusį checklistą. Rečiau pasitaikantis variantas – blogai uždėtas FC (neteisinga gyro kryptis)
- copteris labai dreba – “P” yra per didelis (kai kur dar vadinamas “sensitivity”)
- copteris dreifuoja į šoną – arba copteris buvo judinamas įjungimo metu (gyro kalibravimo metu), arba tiesiog yra per daug vibracijų. Na, arba rėmas yra kreivas. Visas šias problemas reiktų ištaisyti prieš skraidant toliau
- copteris “šokinėja” ore – reikia “pramankštinti” pirštukus ir išmokt švelniai elgtis su throttle. Jei pirštai neklauso – gali padėti nustatymas siųstuve – pasidaryti taip vadinamą “throttle curve”. Bent jau man taisyklė paprasta – 80% sticko eigos turi padengti 20% throttle – o vidurinis taškas turi būt ties kabėjimo pozicija. Todėl aš naudoju maždaug tokius nustatymus:
- MX-20:

- 9x (su Open9x firmware):

- MX-20:
- quad-copteris labai smarkiai linguoja ir bando suktis – greičiausiai sudėtas “+” softas vietoje “x”
Jei pavyksta kaboti ore:
Siūlau pamėginti atlikti tokius veiksmus, prieš įjungiant akselerometrus kabinant kamerą ar perdarinėjant konstrukciją (visi siūlomi pratimai – tik naudojant gyro):
- ramus hoverinimas: pamėginti iškaboti 1m aukštyje, nesiblaškant ir nesvyruojant. 1x LiPo
- ramus hoverinimas 2: pamėginti iškaboti 2.5m aukštyje (tik ne virš galvos), nesiblaškant ir nesvyruojant. 1x LiPo (šie pratimai labai skirtingi!)
- ramus skrydis: Pasižymėti ant žemės tikslą už ~15m. Vietovėl turi būt be medžių ar pan. kliūčių. Ramiai, nesiblaškant į šonus, laikant copterį tiesiai prieš save, priekiu į tikslą nuskristi iki jo (1m aukštyje) ir atbulom grįžti atgal. Pakartoti kelis kartus, pakartoti tą patį kita kryptimi. 1x LiPo
- pasižymėti ant žemės kvadratą, ~20m kraštine. Stovint viename jo kampe pamėginti apskristi visus likusius kampus, nepasisukant (t.y. copterio orientacija nesikeičia). 1xLiPo
- pasižymėti tikslą ~15m nuotolyje. Pamėginti nuskristi iki jo, apsisukti ir grįžti atgal (taigi, copteris visada skristų priekiu į priekį). Šis pratimas bus sunkesnis už kitus, todėl siūlau neskubėti, susikaupti. Labai tikėtina, kad praradus orientaciją copteris nukris, todėl veiksmą atlikti reiktų nedideliame aukštyje (1m), virš žolės. Jei atrodo per sunku – siūlau pradėti nuo paprastesnio varianto – nuskristi iki tikslo, apsisukti 360° kampu ir sugrįžti. 2x LiPo
- pakartoti pratimą, panaudojant ankstesnio pratimo kvadratą, tik šįkart keičiant orientaciją. Taigi, kiekviename kvadrato kampe copteris turi pasisukti ta kryptimi, kur žiūri kraštinė ir skristi. 2x LiPo
- pakartoti kvadrato bandymą 2.5m aukštyje, kvadratą padarius ~30m kraštinėmis. 2x LiPo
Jei visus aukščiau išvardintus bandymus pavyksta atlikti be problemų (ir pakartoti tai, kas padaryta) – ką gi, sveikinimai, pirmas copteris savo darbą atliko. Dabar galima konstruot ką nors didesnio, pamėgint atlikt kilpas, įsijungti acc ir pasikabinti kamerą… Galimybės plačios!
Jei nepavyksta – nereikia nusiminti. Reikia kartoti, kartoti, kartoti… Vienas žmogus, kuris darė gražias foto man pasakojo, kad mokinosi skraidyti metus laiko, kasdien po valandą – pagal grafiką. Neįtikėtina kantrybė – bet rezultatas džiugina….
Update 2013 pabaigoje: kiek žinau, ta malka vis dar skraido – pakeitusi du naujokus šeimininkus (ir neskaičiuojant mano eksperimentų) ;-)
Update 2015.03 – apie malkos likimą nieko nežinau, bet atnaujinau linkus. Kai kurių produktų neliko, tai gali būt šiek tiek nesusipratimų – rašykit, taisysim…
Labas,
gerai viskas aprašyta, tikrai aišku kaip ir ką daryti. Bet čia daugiau praktika. Ar galėtum parašyti arba patarti kur ieškoti “skaičiavimų” dalies ? t.y. kodėl tokie varikliai, kokį svorį jie gali pakelti, kokia baterija (talpa) palaikys tuščią copterį ore maksimalų laiką ? kokia baterija (-os) palaikys maksimalų svorį maksimalų laiką ? greičiausiai yra kažkoks baterijos talpos/svorio santykis. Esu visiškas n00b šiame reikale, bet noriu pradėti nuo “teorijos”, bent elementariai pasiskaičiuoti kelis parametrus, kurių tikėčiausi iš skraidyklės. Ačiū už atsakymą
beje ar esi bandęs FC su autonominiu režimu, be tiesioginio valdymo ? pasiskraidymai pagal GPS trajektorijas/aukščius. parašyk kokius FC pats naudoji ir kodėl. ačiū dar syk
Skaičiavimams:
http://www.ecalc.ch/xcoptercalc_e.htm?ecalc
FC esu bandęs, įvairius, bet apie autonominius režimus galima bus kalbėt po to, kai pasidarysi penktą copterį….
:liux gera rasliava, tik
tas video su DJI minkstom kojom ir DJI klonai is HK juk nieko bendro neturi.
Visiskai skirtingi produktai ir dji clonu kojos taip nesilanksto.
Turiu viena toki rema is HK. Viskas OK, su vibracijom viskas normos ribose,tik kad sunkus jis kaip ir DJI remai ir cia yra minusas, ypac pradedantiesiems.
Turiu ir DJI remu ir kitu,kuriu kojos sukinejasi,bet paprastam skraidymui tas praktiskai neturi itakos. Pats belekaip susikales rema dar gali daugiau problemu turet,negu su tokiu:)
Super , visada galima visiems naujokams pakist sita darba , ir tegu skaito pries uzdavinedami visus klausimus :)
Labas, ka reiškia sakinys: “Reikia nepamiršt, kad ESC reitingas turėtų viršyti maksimalią varikliukų naudojamą srovę. ”
Kaip suprasti?
Ačiū.
Maksimali atlaikoma ilgalaikė ESC srovė turi būti didesnė už variklio naudojamą srovę. Pvz. jei ESC reitinguojami 30A, tai varikliai neturėtų naudoti daugiau nei 30A.
Praktikoje daromi ir atvirkštiniai variantai (kartais 20A ESC atlaiko > 60A trumpalaikę srovę ir t.t.), bet kad taip daryti – reikia žinoti, ką darai. Todėl naujokui geriau naudotis ta taisykle – ESC turi atlaikyt daugiau nei varikliai.