If a Picture Is Worth a Thousand Words, Then Video is Priceless!
If a Picture Is Worth a Thousand Words, Then Video is Priceless!
I’m working on long-range (60km+ one direction, 200km+ total range) FPV plane. Almost entire plane is built from scratch (batteries, airframe, autopilot, antennas) and i’m trying to choose right components.
For 60km+ range i probably can’t go with single antenna – i need array of antennas (other options – LNA (good LNA are very expensive!), more power to VTX (and i need electric power for motor, also – interference), trackers on both sides (too complex and error prone)). Now just need to choose correct polarisation option…
So, my options at this moment – circular polarized array (CP BiCircles – i like circles :P ) or linear polarized array (again, bicircles). Both have high gain (~16dBi for CP array, ~17dBi for LP array), both can be built to be flat (another reason why yagi antenna is out of scope – too big to transport).
Lots of resources on internet about CP/LP choice, in general all agree about:
So, question remains – how much banking is too much for LP, and how much image quality i will loose for using LP? Knowing this, i can choose right antenna array. To answer this question, i did simple test. Conditions:
What i got (distance is top-middle):
OK, my old CP antennas lived trough hell (lots of crashes, repairs, re-soldering, tunning) and probably do not have < 1.5 SWR anymore. But i didn’t expected them to perform so bad, compared to LP…
< 5km range with CP (OK, bit better signal quality compared to LP – less noise, no sudden signal loss), that’s approx 20km total range. 10km range with LP (still good signal when banking – check video) – that’s approx 40km total range without attenuator and in better weather/RF conditions (and really simple antenna construction, Vee’s won’t be destroyed by trees anymore) – i think, we got clear winner here.
Next in work queue – BiCircle antenna array for 60km+ range (and i guess 80km range should be easy too).
Notes:
I’m building long-range plane and was looking for camera with small frontal area. All my FPV cameras are PZ0420 (with or without IR filter, also known as CMQ1993X on sc2k, sold as CC1333 and CC1333-B on surveilzone) – great cameras for FPV, but huge drag on fast plane.
Found this one – HS1149F – acceptable price and small enough. After 2 weeks… :
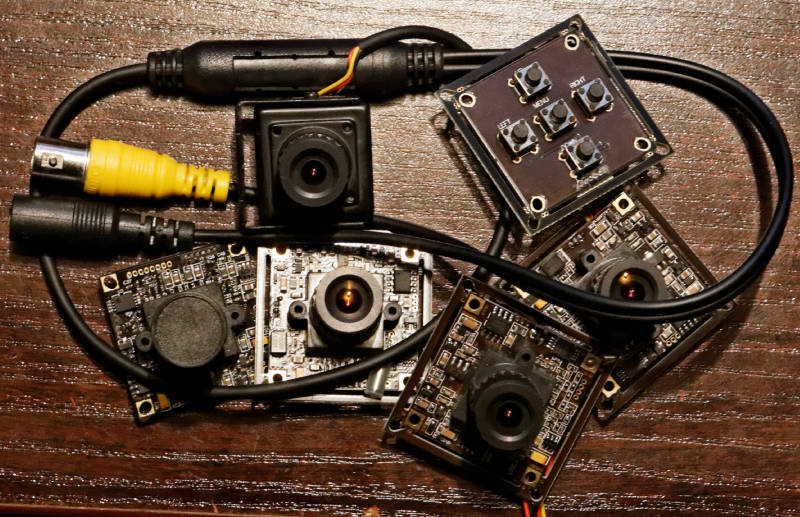
It’s really small! Even with this metal case it’s much smaller than PZ0420 with broken off edges (bottom left).
Did short test in my living room with two cams: PZ0420 (no IR filter, better light sensitivity, bad colors) and HS1149F. Sorry, no flight videos with new cam – i won’t have time for at least two weeks and weather sucks (CMQ1993X – the same PZ0420 with IR filter video is here). I maybe add video with new cam later…
So, PZ0420 in my living room, pointing straight to light source:
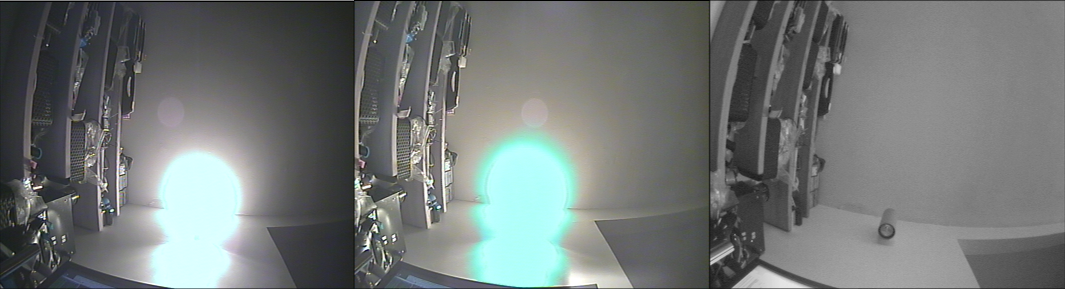
From left to right:
The same image with HS1149F:
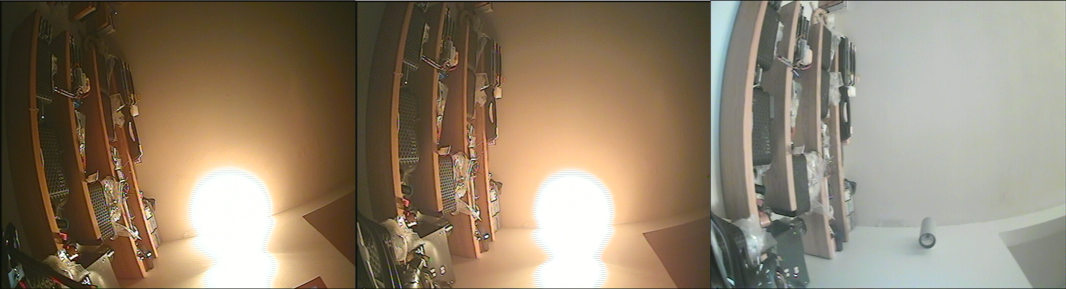
From left to right:
In short:
First flights after few weeks, if it’s in-air performance will be great – i will replace my other cams too ;-)
EDIT: short comparison video is here:
https://www.youtube.com/watch?v=o9vCnUSNJYE
Pagaliau radau laiko viską (tiksliau, didžiąją dalį) sudėt į krūvą….
Lots of space around. Sun, clouds and blue sky. Few kilometers until closest hard object.
Complete freedom. Almost SPAAAAAAACEEEEEEEEEEEEEEEEE!!!! (c) Portal
A bit earlier, using the same equipment:
Šiandien po ranka papuolė keli kadrai. Tiesiog gražios spalvos ir tiek ;-)
Video bus kažkada vėliau…










Kažkada rašiau ilgus postus apie antenas, forume jiems ne vieta – permetu čia, kad netrūnytų HDD ;-)
After some break…. ;-)
2013.08.02-2013.08.04 – great weekend with lots of airplanes, multicopters and other stuff. I just post some media here (from my cams/DVR)…

Smilga plane from above

Our meeting place

Dangerous encounters
DVR-mix (low quality, i will add gopro and other cam content later):
Join us in 2014! =)
Namie atsirado pora smagių dalykų, kuriuos galima kilstelt į orą ir padaryt kelis visai neblogus kadrus. Vienas iš jų – SONY NEX 5N su 16mm objektyvu (su laiku upgradinsiuos) – turiu jau kurį laiką, spėjau ir kelis kadrus padaryt. Kokybė neypač, bet lyginant su kitais piguva aplink – tenkina:

Gal šiek tiek per tamsi, bet tai… Kad tamsoje ir fotografavau – galima sakyt, kad pirmas 2012 metų žiemos sniegutis:

Kitas žaislas (yra jau pora savaičių, tik orai neleido išmėginti) – GoPro 3 Black. Mažas, lengvas žaislas, kurį nesunku užmest ant beveik bet kokio copterio ar lėktuvo, o video kokybė yra visai pusėtina (tiesa, su nex‘o nesilygina niekaip). Vienas kadras iš video (tik resize’inta iš 1080p, be protune):

Tiesa, su GoPro pakol kas dar nesusišneku – sudėtas naujausias firmware, filmuojama prie pakankamo apšvietimo, lyg ir viskas OK – bet video kokybė kai kur galėtų būt ir geresnė – detalės išplaunamos. Su Protune lyg ir geriau, bet dar nepavyko susidraugauti su spalvine korekcija…
Žodžiu, to be continued, o tam kartui – vienas trumpas filmukas, padarytas pirmą žiemos dieną (į spalvas per daug nereiktų žiūrėti, pirmas bandymas perprasti protune ;-)
Atėjo žiema (kas iš to, kad ruduo kalendorinis) – tai prisiminimui video su rudens vaizdais:
[vimeo clip_id="52651678"]
Viskas iš vieno copterio, be gimbalų ar stabilizacijos, taigi geresni video (lėktuvėlių, hex’o ir t.t.) dar bus kažkada ateityje. Gaila tik, kad vimeo persistengė su kompresija – ir taip pas pirmą GoPro ne pyragai su 1080p vaizdo kokybe, o dar šitaip perspaudus…
Taigi, dabar oficialiai galėsiu triukšmaut (su tam tikrais apribojimais ;-) radijo eteryje:
Day changed to 15 Kov 2012
(17:16:53)-!- You're now known as LY4ABL
Pakol kas tik B kategorijos leidimas, bet jau esu užsirašęs ir A kategorijai. Tuomet galėsiu tuo pačiu užsiimt ir užsienyje ;-)
Sumečiau pagal brėžinius vieną quadą, gal kažkam pravers – nes tikrai paprastai išsipjauna ir pasidaro:
Dar reiks varžtelių, gabaliuko 5-6mm faneros (kojytėms įtvirtinti), velcro gabaliuko, laidelių nuo RX (bei maitinimo), 15x15mm dvipusės folijos gabaliuko (jei nesinori lituot 5 laidų į krūvą) ir savo RX. Dar galima užkabint kamerą, kad nebūtų nuobodu ;-)
Realaus aparato foto bus vėliau…
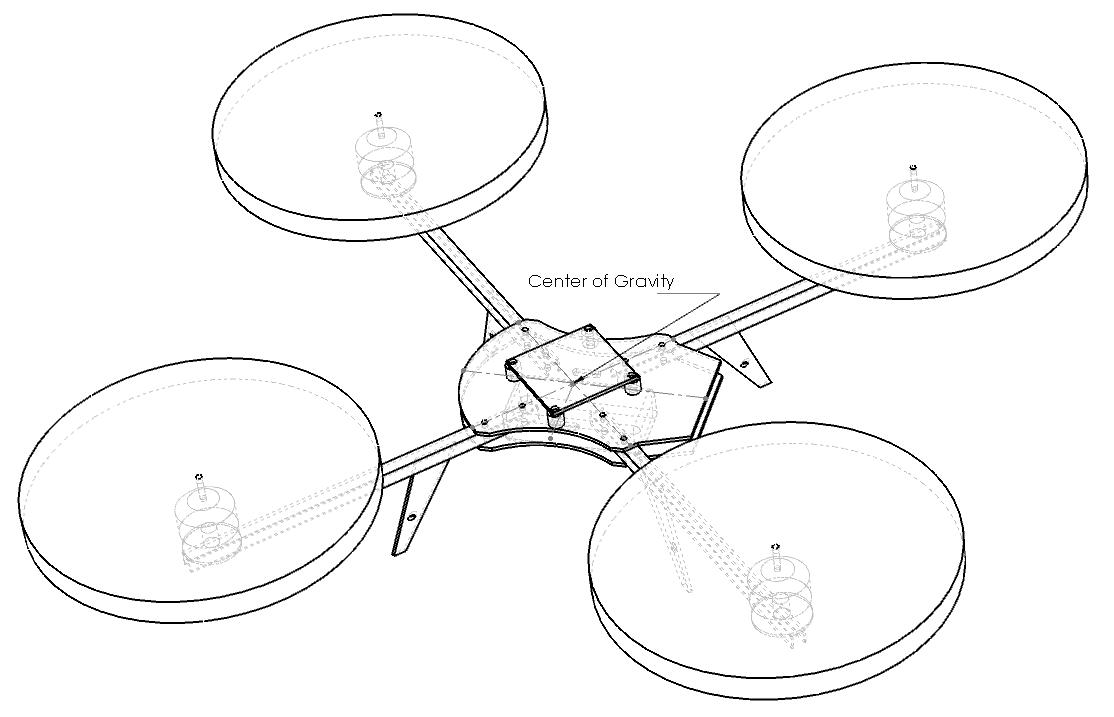

Brėžiniai:
Update:
nepirkite aukščiau minėtų greičio regų. Kažkokia bloga partija papuolė, dveji susvilo per pirmą vakarą, taip ir nepakėlę quado į orą. Išsilupinėjus – panašu kad jie kažkokie “antrą kartą naudojami” – pritaškyta lydmetalio, ant FET’ų – daugybė grubių mechaninių pažeidimų ir t.t.. Pirkit ką nors kita (geriausia – ką nors su išoriniu 16M rezonatorium, N-FET ir programming pad’ais, jei domina alternatyvus firmware).
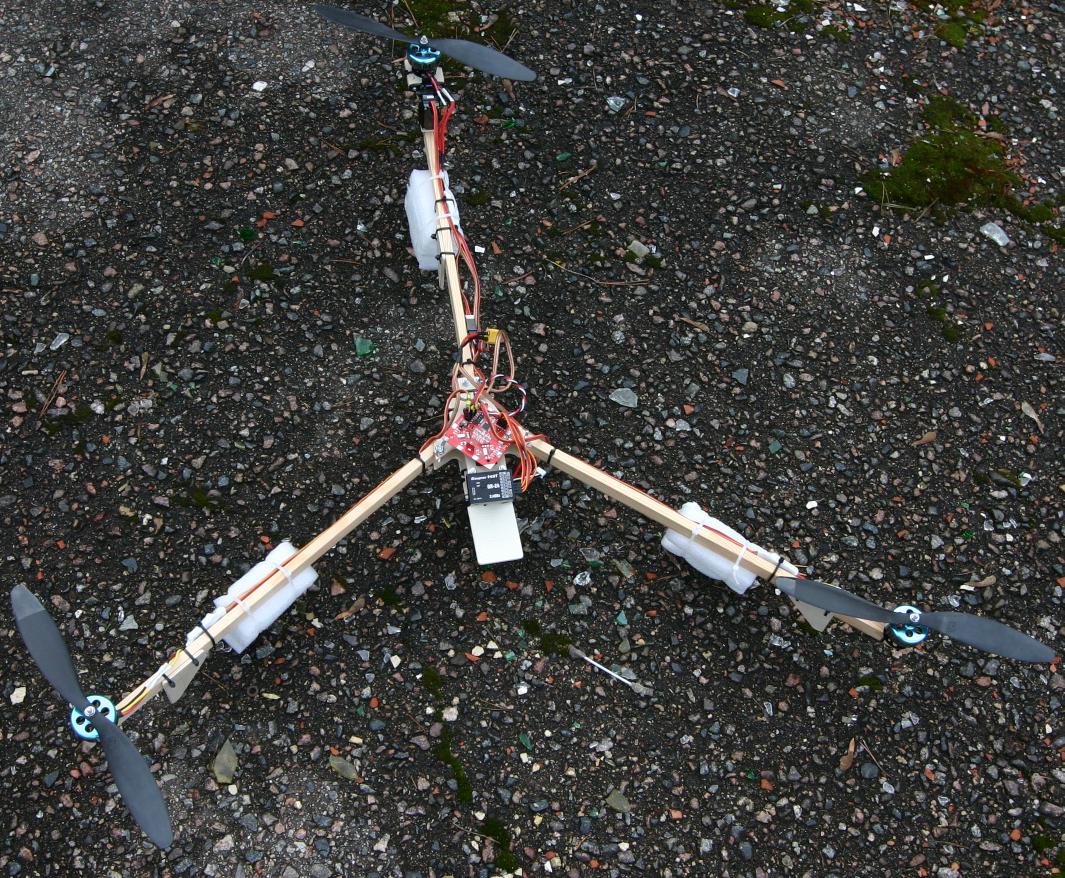
Na ir kelios gatavo quado foto:


Update 2012.02.04: užsisakiau iš ebay kelis ESC, foto buvo įdėta “Pentium”, gavau “Cloud”. Nu bet tiek to, pas Cloud yra ext osc, viskas puikiai susiflashino ir skrenda. Gal tik variklius su laiku reiks atsinaujint, nes jie kažkokie “natūraliai išsibalansavę” – t.y. turbūt magnetus klijuojant niekas nesistengė vienodai klijų užpilt.

Atitinkamai, kelios naujos foto (kojytės iš vandentiekio apšiltinimo šlangos):


Sugalvojau kad reiktų pasidaryti trikopterį, bet tai ryškiai buvau nepirmas, kuriam kilo tokia mintis. HK buvo išpirkti visi galinio variklio mountai, taip pat ir Plush’ai su DT750. Ką gi, darom viską savaip ;-)
Yaw mechanizmas:
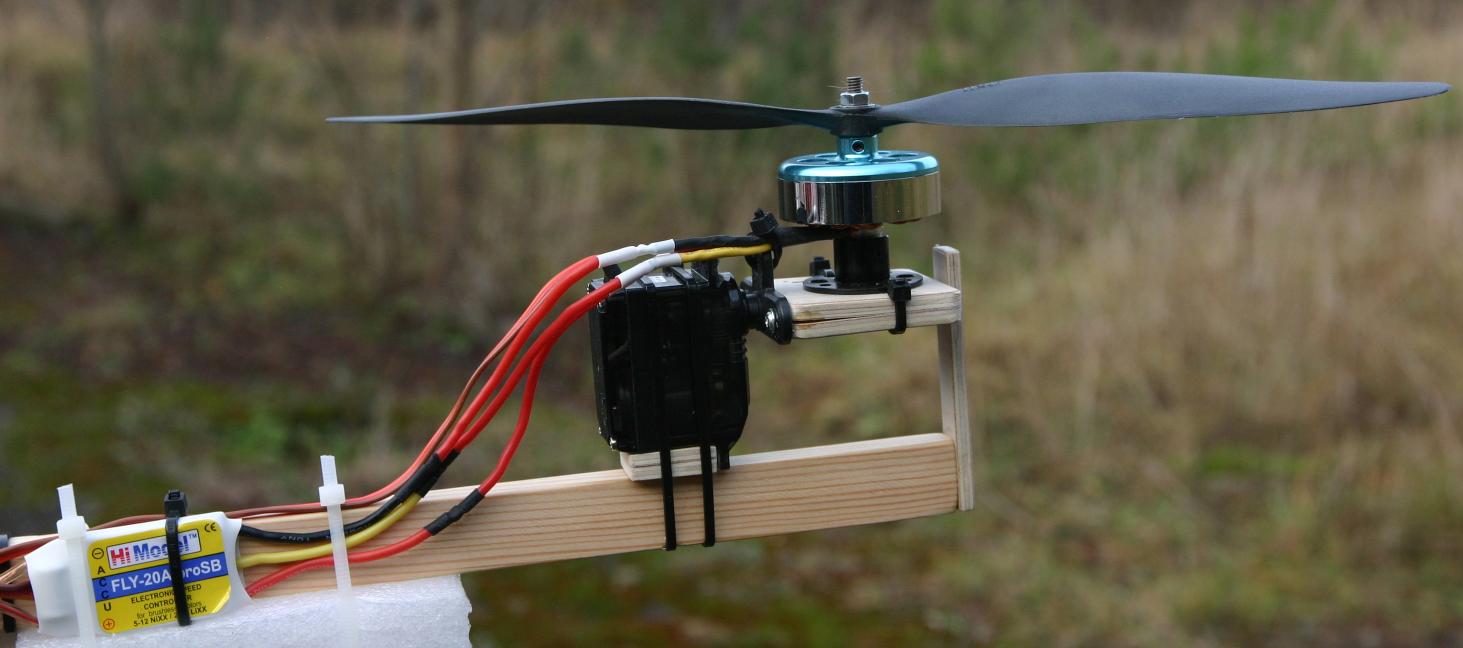
Padarytas paprastai – iš trisluoksnės (iš tikro – penkiasluoksnės, jei skaičiuot laminatą) faneros, suklijuotos kad būtų storiau. Nuotraukoje matomas įskilimas užpiltas CA, jis laikosi tvirtai. Iš kitos pusės – 7mm ilgio, 3mm diametro anglinis strypelis, kuris laisvai sukasi kitame faneriniame “įdėkle” (tam galima panaudot ir HK600 sraigtasparnio guoliukus su 3mm skyle – mechanizmas būtų dar sklandesnis). Beje, 3mm anglinių strypelių yra santykinai pigiai pirkt modelyje. Jie ten pulltruded, ganėtinai sunkūs (lyginant su “brangiais” variantais), bet savo kainą atidirba.
Mano nuomone, gavosi tikrai ne blogiau nei rcexplorer yaw’as. Jokio laisvumo, o jei dar nebūčiau gailėjęs supjaustyt servo – tai būtų ir aukštis būtų normalus. Beje, servo panaudota šita (reik įsidėt į krepšelį – kaina krinta maždaug dvigubai) – ne skaitmeninė, bet užtat tikrai masyviai padaryta.
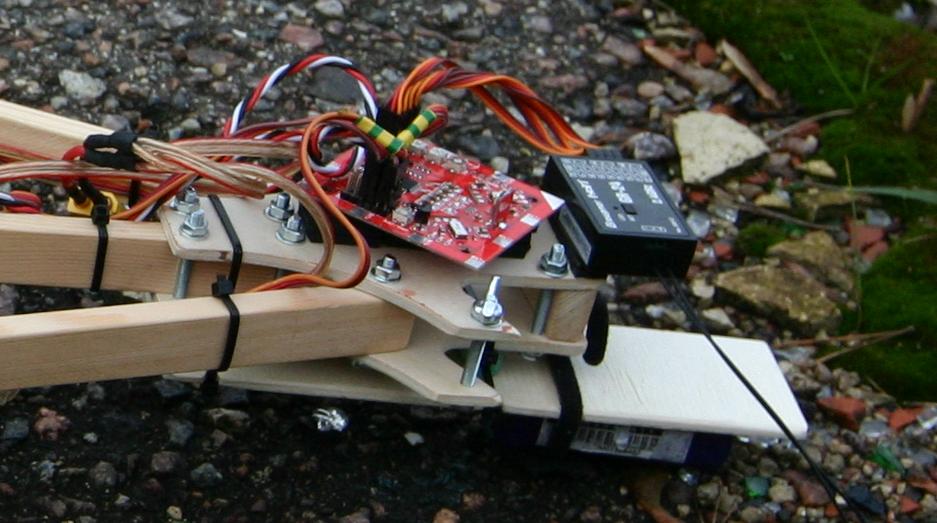
Pagrindas irgi padarytas iš tos pačios faneros. Priežastis paprasta – taip ir neradau, kur pardavinėtų stiklotekstolitą ar getinaksą suprantamais kiekiais (ir nefolijuotą). Pirkt folijuotą ir nuėsdint – nesamonė, be to brangu; o visokios lytagros ir heliopoliai parduoda po 3+kg lakštus – nebus kur juos dėt paskui…
Kaip parodė realybė – faneros pilnai užtenka, atsparumo per akis (jau spėjau sulaužyt vieną kanopą, nukritau belenkiek kartų – turbūt reikia iš 100m nulėkt vertikaliai, kad sulaužyt fanerinį korpusą. Bet tokiu atveju manau ir stiklo tekstolitas lūžtų, o jį pakeist dar daugiau terlionės.
Palyginau su turimo 2mm stiklo tekstolito plokštele – svoris panašus. Taip kad – kodėl nepadaryt pigiau? ;-)
Didžiausias tokio tricopterio privalumas – tai, kad jis labai patogiai susilanksto. Atsukam pora varžtų (foto matosi, kurie turi “rankenėles”), kojytės užsilenkia – viskas, galima keliaut namo.
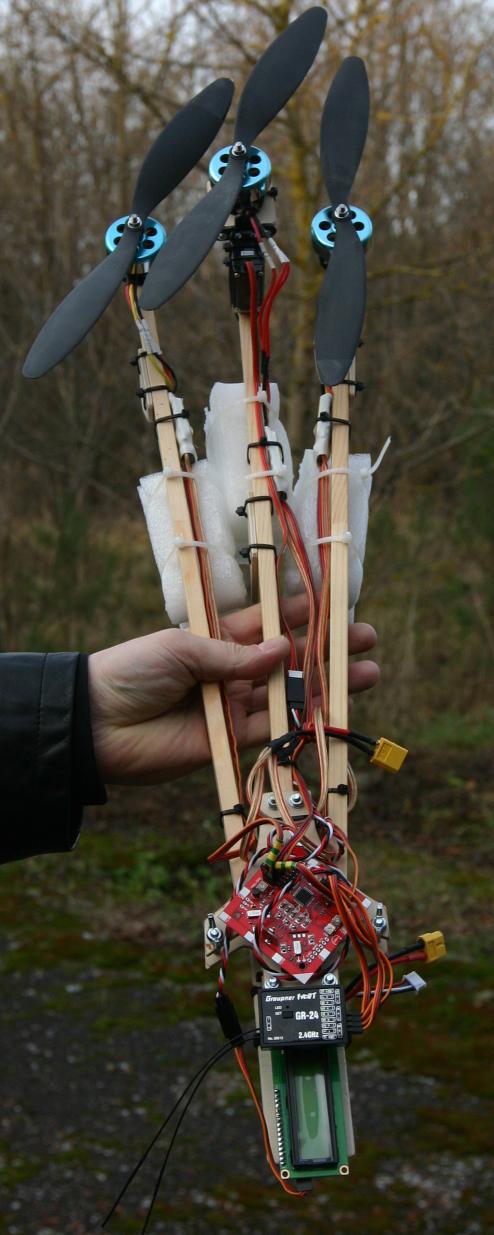
Kojytės 10×20, iš pagaliuko, pirkto “Medžio centre” (tas pats pagaliukas, iš kurio dariaus ir putos pjovimo “stakles”). Kaina… Gal du litai už du metrus? Taigi užtektų porai tricopterių ;-)
Tvirtumo užtenka per akis (tiesa, šiandien nutėškiau tiesiai ant vienos kojos, tai pagaliau viena sulūžo, bet iki to laiko buvo daug griuvimų – susilanksto ir tiek).
Tos baltos pūslės – tai mokymuisi uždėtos sulankstyto LPDE “kojytės”. Teoriškai turėtų sušvelninti nusileidimą ;-)
Na ką. 3x regai (dar neperflashinau, bet būtinai tai padarysiu) + 3x DT700 – 100lt iš viso (nusipirkau berods propo forumuose, kartais pasitaiko, dar + gavau programavimo kortelę); kontroleris su LCD – dar 90lt, baterija 30lt, serva 32lt, propai 12lt (beje, papuolė labai blogos kokybės), laidų neskaičiuosim, varžteliai, fanera ir pagaliukai dar kokie 10lt. Imtuvas kainuoja daugiau už visa kita kartu sudėjus, na bet šito gėrio kiekvienas RC mėgėjas turi ;-)
Sumoj ne tiek ir daug, turint omeny kad teoriškai šitas aparatas gali nešiotis GoPro. Va tik jį suderint kad skristų kaip aš noriu, o ne kaip jam patinka – čia jau problema…

Su laiku atidirbsiu sistemą, žiū gal ir kokį video iš trikopterio įmesiu ;-)


Video nebus :P
Turėjau tokį lėktuvą, kuris taip ir nepakilo į orą. Tai CG nepataikiau, tai kitos problemos, taip ir liko – sveikas, gražus – bet neskrendantis…
Ko tik jam nedariau – ir svarelius dėjau, ir papildomą nosį klijavau – niekas nepadėjo, skrydžio skrydis baigdavosi už 3 metrų žolėje. Na, šiaip gal ir variklio/propelerio kombinacija nelabai tinkama buvo, bet kad kitokių po ranka neturėjau:

Turėjau ir kitą lėktuvėlį, kuris skrido, gal net ir visai neblogai:

Deja, padarytas jis buvo iš grindų pakloto – pasirodo, jis visiškai neatsparus bet kokiems smūgiams…

Su laiku tas antrasis “pametė” sparnus, izoliacija nebepadėjo – žodžiu, priešingai nei aš norėčiau – pasidalino į tris dalis.
Kadangi jos gulėjo nenaudojamos – vietoje to, kad išnešti į rūsį jas suklijavau į krūvą:

Tiesa, elektronikos nedėjau į vidų, nes kažkaip nelabai buvo panašu į skrendantį aparatą… Dar turint omenyje, kad dvejus vakarus mėginau vien valdymą (pas mane Futaba 7C) susiprogramuoti taip, kaip man patinka (o ne taip, kaip veikia) – tai nedėjau daug vilčių į tą skraidantį aparatą. Bet, panaudojus visus tris mixus pagaliau pavyko pasiekti norimą rezultatą.

Sulaukiau nors vienos gražesnės dienos (taip atrodė iš pradžių) ir mėginau skrist.
Pasirodo – skrenda! Kaip nekeista – netgi labai gerai skrenda – puikus valdymas, nėra to “vartymosi ore”, kai sukiojama vien eleronais, įmanoma išlaikyti ore net ir esant dideliam AoA… Žodžiu, anie dveji gavos nekokybiški, užtat šitas labai patiko:
Vienintelis minusas – užėjo audra, pakilo vėjas, todėl nusileidimas gavosi labai nevykęs – “snapu” į kalvos šlaitą…

…už 5 minučių užėjo audra su ledais, gerai kad spėjom sulysti į auto ir pabėgti iš ten….
Susitaisysiu – dar pamėginsiu ir kamerą užmauti, gal jis dar skris kartelį ;-)
Update 2011.12.23: perdariau snukį. Dabar jis padarytas iš XPS putos su stiklo audiniu, tepta poliuretaniniu laku (vietoje epoksidkės). Gavosi pakankamai sunkus variantas, bet užtat labai tvirtas. WBPU tikrai ne toks tvirtas kaip epoksidkė, bet užtat jis elastingas. Nusivožiau iš gero aukščio stačiai į pievą – nieko tokio, nuvaliau žoles ir galima skrist toliau. Snukį taip pat teko perdaryt – dabar ten kitoks mechanizmas, bet susireguliavus skrenda visai pusėtinai. Wroom! ;-)

Priekinis stabilizatorius valdomas pilnu plotu, kas teigiamai jaučias valdyme (tiesa, pavasarį turbūt ilgai pasiterliot reiks, pakol aš jį susiderinsiu kad būtų tinkamo jautrumo). Konstrukcija paprasta – senas servomechanizmas sukioja anglinį vamzdelį, ant kurio savo ruožtu prikabinti sparniukai. Visa tai įtvirtina faneriniuose “guoliuose”.
